

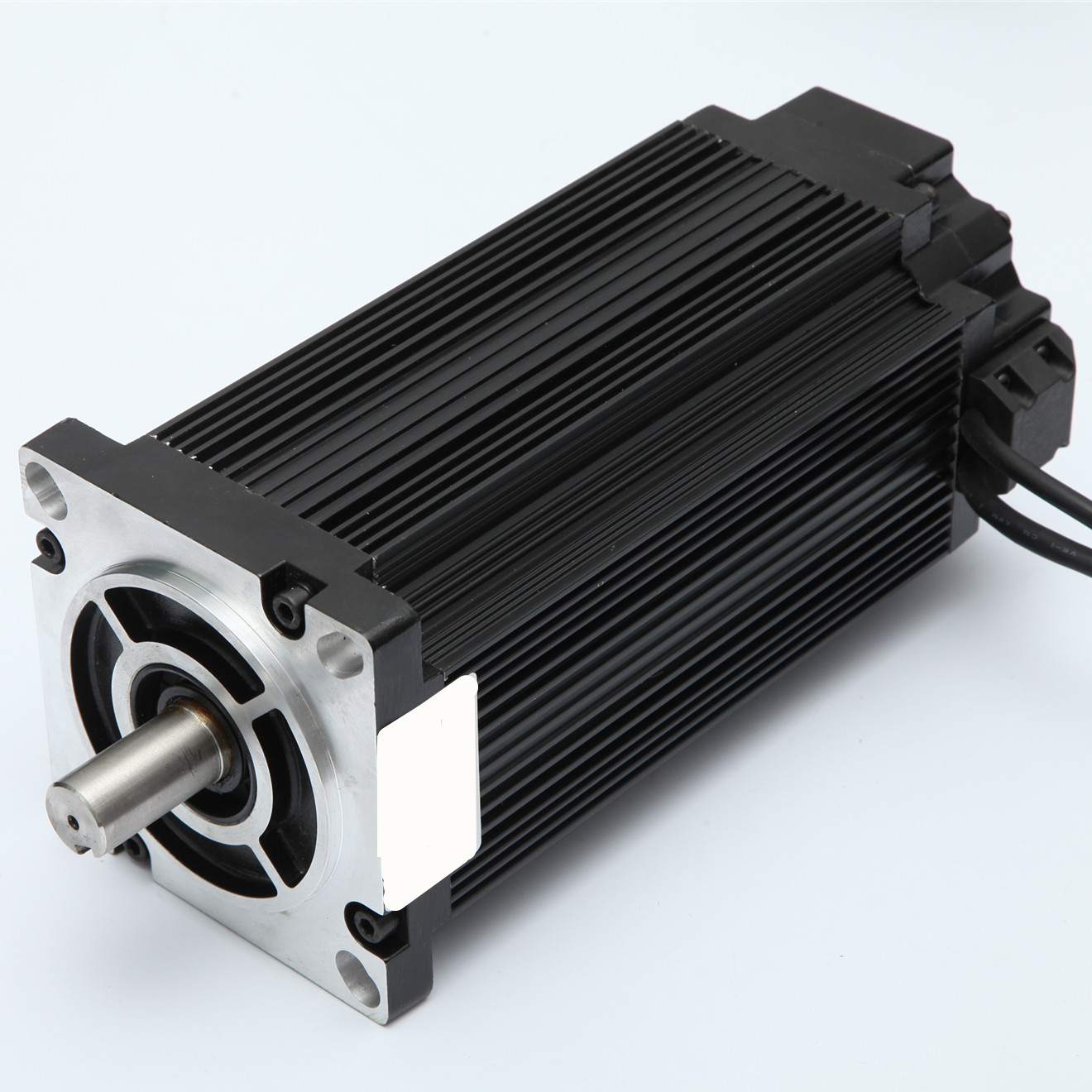
110mm बन्द लुप मोटर 220V 20Nm ठूलो टर्क स्टेपर मोटर एलईडी डिस्प्लेको साथ
NEMA42 Easy Servo Series(NEMA42 Closed Loop series)
मोटर इलेक्ट्रिकल प्यारामिटरहरू:
| मोड | चरण कोण | वर्तमान (A) | प्रतिरोध (Ω±10%) | इन्डक्टन्स (mH±20%) | होल्डिङ टर्क (Nm) | मोटर लम्बाइ (मिमी) | इन्कोडर संकल्प (पीपीआर) | लागू हुने चालक |
| 110HCE12N-B39 | १.२° | ४.२ | १.२ | 13 | 12 | १३९ | १००० | 3HSS2260 |
| 110HCE20N-B39 | १.२° | ४.२ | १.८८ | 18 | 20 | २२१ | १००० | 3HSS2260 |
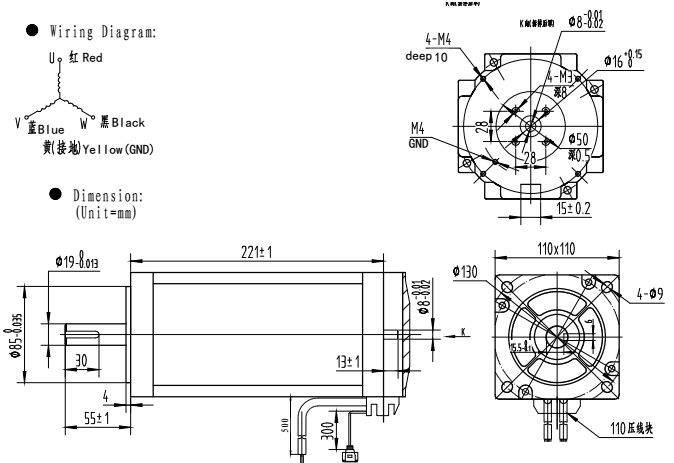
मोटर आयाम: मिमी
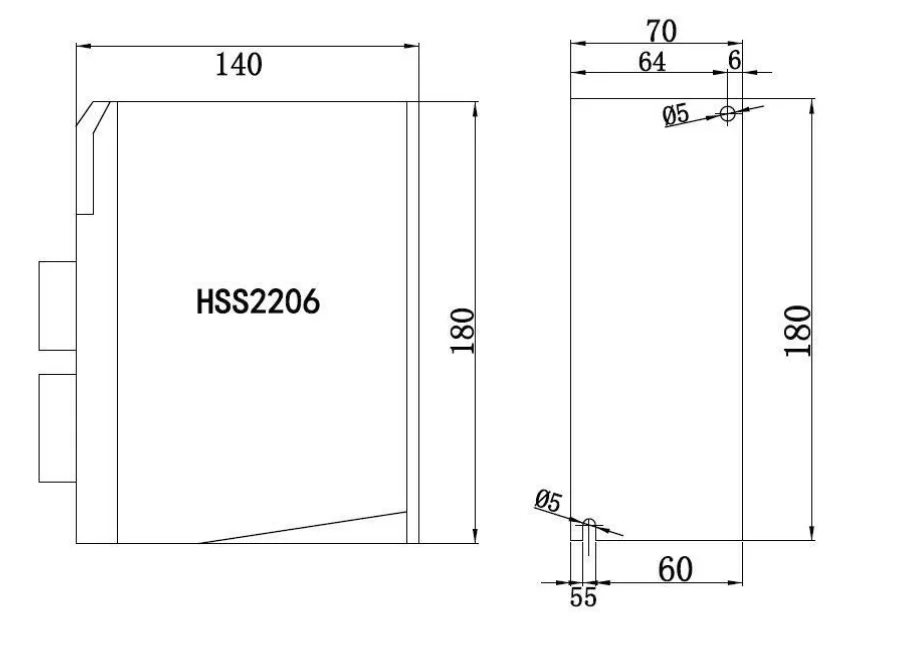
चालक 3HSS2260
विशेषताहरु
1, 32-bit DSP र भेक्टर बन्द-लूप नियन्त्रण प्रविधि
2, चरण गुमाउनु बिना, स्थिति मा उच्च शुद्धता
3, मोटर आउटपुट टोक़ र काम गति सुधार गर्नुहोस्
4, चर वर्तमान नियन्त्रण प्रविधि, मोटर तापमान वृद्धि रोक्नुहोस्
5, विभिन्न प्रकारका यान्त्रिक लोड अवस्थाहरूमा अनुकूलन गर्नुहोस् (कम-कठोरता पुलीहरू सहित), होइन
लाभ प्यारामिटर समायोजन गर्न आवश्यक छ
6, चिकनी र भरपर्दो चलिरहेको, कम कम्पन, गति मा ठूलो सुधार र
सुस्त पार्नु
7, कम्पन बिना शून्य गति स्थिर को क्षमता
8, 3-चरण 86 (NEMA34) र 110 (NEMA 42) हाइब्रिड सर्वो मोटरमा अनुकूलन गर्नुहोस्
9, अधिकतम चरण-पल्स आवृत्ति 200KHZ
10, माइक्रो स्टेप 400-60000 पल्स/रेभ
11, भोल्टेज दायरा AC150-240V
१२, ओभर करन्ट, ओभर भोल्टेज र ओभर पोजिसन प्रोटेक्शन
13, छ डिजिटल ट्यूब डिस्प्ले, प्यारामिटरहरू सेट गर्न सजिलो र मोटर चलिरहेको निगरानी
राज्य
माइक्रोस्टेप चयन:
| कोड | परिभाषा | दायरा | पूर्वनिर्धारित मान | टिप्पणी |
| PA0 | संस्करण संख्या | ५०१ | परिमार्जन गर्न निषेध गरिएको छ | |
| PA1 | नियन्त्रण मोड चयन | ०~२ | 0 | |
| PA2 | मोटर प्रकार चयन | ०~२ | 0 | |
| PA3 | पावर अन डिस्प्ले | ०~७ | 0 | |
| PA4 | हालको लूप Kp | ०~१००० | २०० | परिमार्जन गर्न निषेध गरिएको छ |
| PA5 | हालको लूप कि | ०~१००० | ३०० | परिमार्जन गर्न निषेध गरिएको छ |
| PA6 | स्थिति लूप Kp | ०~१००० | ३०० | |
| PA7 | माइक्रो चरण सेटिङ | 400~60000 | ४००० | |
| PA8 | इन्कोडर रिजोल्युसन(1000) | ४००० | परिमार्जन गर्न निषेध गरिएको छ | |
| PA9 | इन्कोडर रिजोल्युसन(1000) | 40~30000 | १००० | |
| PA10 | वर्तमान होल्डिंग | १०~१०० | 40 | |
| PA11 | बन्द लूप वर्तमान | १०~१०० | १०० | |
| PA12 | आरक्षण | |||
| PA13 | आरक्षण | |||
| PA14 | स्तर सक्षम गर्नुहोस् | ०/१ | 0 | |
| PA15 | अलार्म स्तर | ०/१ | 0 | |
| PA16 | पल्स मोड चयन | ०/१ | 0 | |
| PA17 | पल्स एज | ०/१ | 0 | |
| PA18 | मोटर घुमाउने दिशा | ०/१ | 0 | |
| PA19 | JOG गति | १~२०० | 60 | |
| PA20 | PEND मोड खण्ड | ०/१ | 0 | |
| PA21 | PEND स्तर | ०/१ | 0 |
चालक आयाम (मिमी):
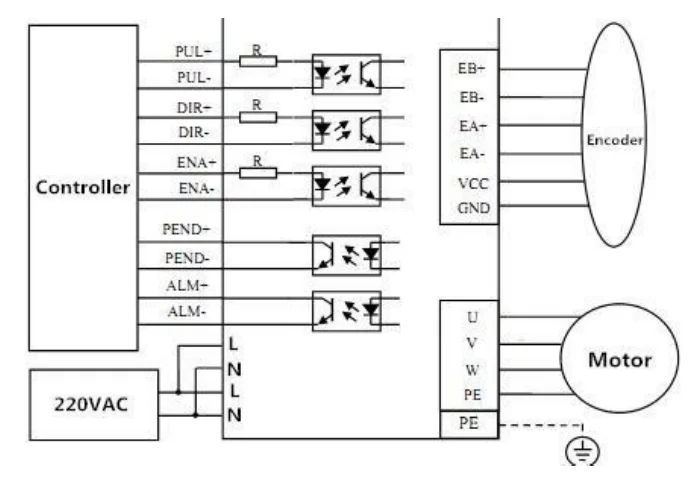
तारिङ रेखाचित्र:



,planetary gearbox,worm gearbox,reliable and durable,suitable for all kinds of motors, such as dc motors ,servo motors and stepper motor,to get bigger torque")
